.png)
Handheld SLAM 3D Laser
Scanner + GNSS RTK
CHCNAV RS10

三次元計測で“遺跡を未来へ”_筑波大学 下田教授が語る、
バンテアイ・チュマール遺跡(カンボジア)の挑戦
ハンディ型スキャナを活用した文化財計測の実践事例を紹介。
「計測技術が、遺跡の記録と未来をどう変えるか」を筑波大学 下田一太教授に伺いました。

高精度ハンディ型3Dレーザースキャナ
RS10は、RTK、レーザー、ビジュアルフュージョン技術を組み合わせた高精度なハンディ型レーザースキャナです。屋内外問わず、さまざまな環境で高精度な測量が可能です。
スキャンサンプル画像
土木現場 ▶
土木現場でRS10を使用した際、出来形ヒートマップとして合格でした。
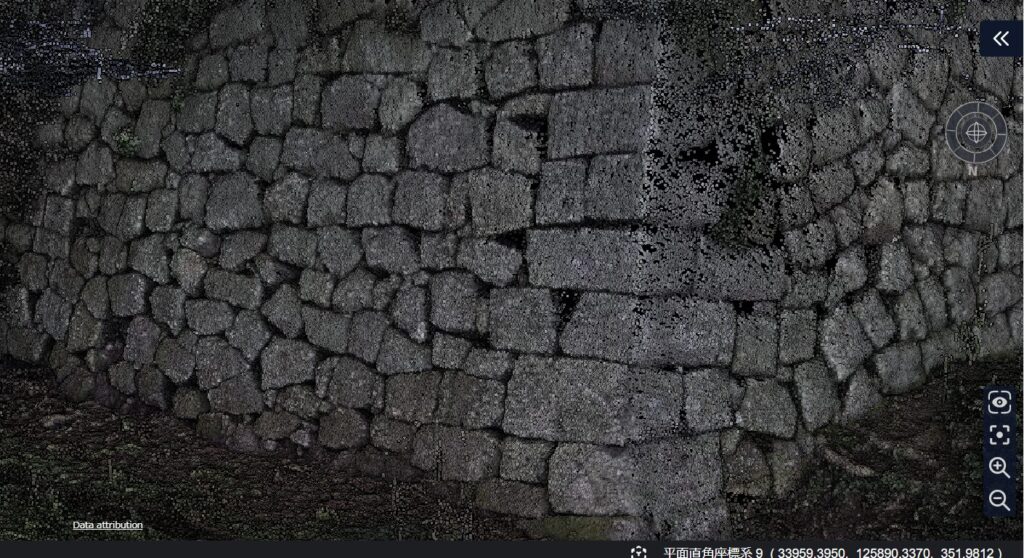
◀ 文化財(石垣)
従来は地上レーザースキャナを使って1日をかけて測量を行っていましたが、RS10を活用することで、わずか15分で計測が完了しました。
ガウシアン・スプラッティング(追加オプション)▶
RS10で取得したデータを Gaussian Splatting(ガウシアンスプラッティング)で再構成。
従来の写真や3D表示では伝わりづらかった 奥行き・質感・陰影・空間のつながり を忠実に表現できます。

活用事例①
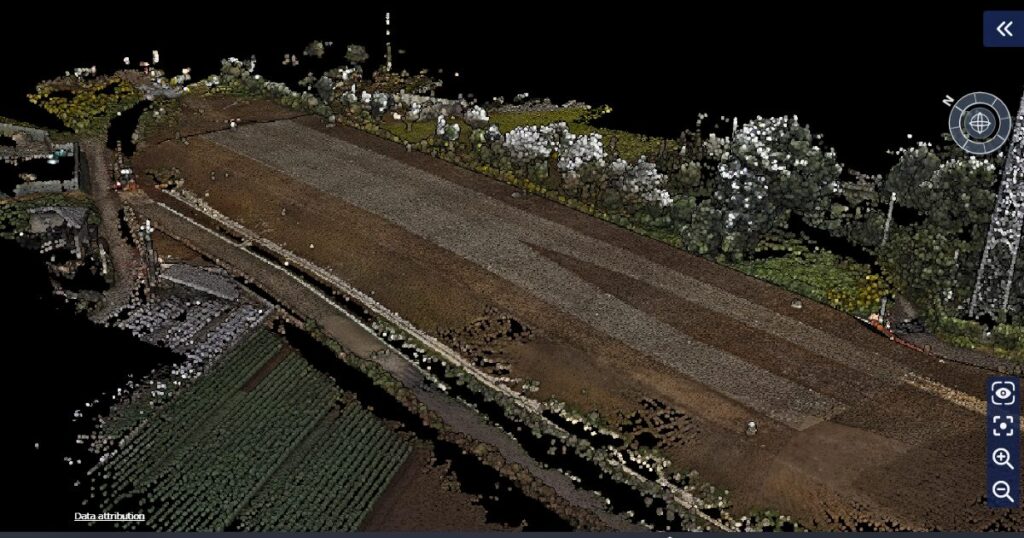
山林計測での活用
山林の等高線の作成、転石調査を想定とした、トラバース測量・ドローン・ RS10の3種を用いたモデルケースです。
トラバース測量
基準点設置により現地座標に整合
※GNSSが取得できる場合は必要ございません。
ドローンレーザー
(現況3D)
広域の現況を撮影し3次元モデル化
RS10
(現況3D)
レーザードローンでは取得できない部分的な測量の実施
山の中を歩いて計測することが可能。 ドローンで取得できない場所での補測としても活用可能。
活用事例②
工事前の現況3D計測での活用
工事前の現況把握、起工測量、出来形測量での活用を想定したモデルケースです。
検証点の計測
基準点・検証点設置により現地座標に整合
※付属のLiBaseを活用することで計測可能です
RS10
(現況3D)
工事現場の地形を3次元化
複雑な現況も、歩くだけで誰でも簡単に3次元化が可能
利用方法
追加オプション機能(ガウシアン・スプラッティング)
特徴
5cm精度のリアルタイムSLAM計算
- 1.2Tの計算能力でリアルタイムSLAM計算と点群ブラウジングをサポート
- 最大13,000㎡のエリアで途切れることなくリアルタイムのSLAMソリューション
- RS10のメモリから直接点群データ取得→後処理不要でそのままデータを活かせる
相対精度1cm以内の後処理SLAM計算
- 2次最適化のためのCoPreソフトウェアに対応
- 点群の厚さ2cm以下
- 相対精度1cm以下
RTK測位制度は3cm以内 SLAMマッピングのベンチマークとなる
▼
あらゆる環境で5cmの精度を保証
ループフリーによる効率的な作業フロー
<高精度RTK測位データによる、リアルタイムキャリブレーションとループフリーの経路計画>
従来機器での計測:従来のハンドヘルドスキャナーのパスループ要件を満たすにためには3kmのデータを収集しなければならない
↓
RS10での計測:RS10はループクロージャーが不要。ループのない計測コースを可能にすることで、データ収集は1.8kmに短縮
↓
効率が40%向上
動的環境への適応性
RS10は、測量現場での動的な状況に対応できる高度な処理アルゴリズムを搭載。リアルタイムで移動体を検出し、自動的にデータを調節するため、複雑な環境でも高精度な測量が可能です。
屋外から屋内まで同じ座標系
座標フレームワークをWGS84に統一することで、屋外から屋内まで同じ座標系のデータを取得するため、GPSによるジオリファレンスが不要。
Vi-LiDARテクノロジ一
RS10とセットのソフトウェア『Landstar』の画像モニターで、測定したいポイントを選択するだけでRTK原点とLiDAR点群の交点から3次元座標がリアルタイムに計算される。事前の現地調査をすることなく、ターゲットから15m以内で5cm以内の精度で3次元座標が取得可能。
導入事例

歩いて撮るだけ”で変わる測量業務
▶ 導入前の課題
・ドローンは飛行可能範囲や申請準備に制約があり、固定式レーザースキャナーは設置替えや後処理に時間がかかっていた。
・「もっと手軽に測量できる機材が欲しい」と感じていた。
▶ 導入による効果
・固定式で数日かかる作業が、RS10なら半日程度で完了。
・「ビデオ撮影のように歩くだけ」で操作でき、若手は1回の説明で単独運用が可能。
・点群の見た目がきれいで、社内説明や完成イメージにも活用しやすい。
・測量手法の比率も変化し、RS10が新しい選択肢として定着。
渡辺建設株式会社

手軽さが決め手!RS10で測量業務のDXを加速
▶ 導入前の課題
・TLS(地上レーザースキャナー)を使用していたが、測量準備やデータ取得に時間がかかっていた。
・測量士の高齢化により、新技術の導入に対する抵抗感があった。
▶ 導入による効果
・短時間で測量が可能に!事前準備がほぼ不要ですぐに使える。
・操作が簡単! 高齢のベテラン測量士でもスムーズに扱える。
・受注機会が増加! 他社より早く導入したことで、新たな案件獲得につながった。
協和補償コンサルタント株式会社
特別コラム

三次元計測で“遺跡を未来へ”
筑波大学 下田教授が語る、バンテアイ・チュマール遺跡(カンボジア)の挑戦
研究・保存・教育・観光をつなぐプラットフォームとして、
ハンディス型キャナを活用した文化財の三次元計測に取り組んだ筑波大学の実践を紹介しています。
筑波大学 下田一太教授が率いる研究チーム(建築遺産研究室)
製品仕様
| 絶対精度 | 5cm以内 |
| 相対精度 | 1cm以内 |
| スキャンレート | 320,000 ポイント / 秒 |
| 最大測定範囲 | 120m |
| 視野角 | 360° × 270° |
| バッテリー持続時間 | ホットスワップ可能1時間 |
| 重量 | 1.9kg |
| 動作温度 | -20℃~50℃ |
お問い合わせ・資料請求
こちらの登録フォームにご入力後
CHCNAV RS10のカタログとガウシアン・スプラッティングの資料がすぐにダウンロードできます。
お客さまからのご質問等をお問い合わせフォームにて受け付けております。
必要事項をご入力のうえ、「送信」のボタンを押してください。
お急ぎのご連絡の場合はお電話にてお問い合わせください【大宮支社:048-788-4210】